38 learning to drive from simulation without real world labels
Learning to Drive from Simulation without Real World Labels The driving agent is trained with imitation learning only in simulation, and the translation network transforms real world images to the latent space that is common with simulated images (see... Simulation-Based Reinforcement Learning for Real-World Autonomous Driving This work presents a method for transferring a vision-based lane following driving policy from simulation to operation on a rural road without any real-world labels and assesses the driving performance using both open-loop regression metrics, and closed-loop performance operating an autonomous vehicle on rural and urban roads. 55 Highly Influential
Technology | Wayve Learning to Drive from Simulation without Real World Labels. Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall. Proceedings of the International Conference on Robotics and Automation (ICRA). May, 2019. Learning to Drive in a Day.

Learning to drive from simulation without real world labels
sim2real on Twitter: "Learning Semantic Segmentation from Synthetic ... Closing the Sim-to-Real Loop: Adapting Simulation Randomization with Real World Experience https:// arxiv.org/abs/1810.05687 week 5 diss 1.docx - "Simulation outcomes indicate that... " Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems" (Bewley, A., et al., 2018). This being said, I'll want to make sure that the simulation content is going to be relatable to the students, as well as something that they'll be able to apply to their coursework. "Learning to Drive from Simulation without Real World Labels." - DBLP Bibliographic details on Learning to Drive from Simulation without Real World Labels. Stop the war! Остановите войну! ... "Learning to Drive from Simulation without Real World Labels." help us. How can I correct errors in dblp? ... Learning to Drive from Simulation without Real World Labels. ICRA 2019: 4818-4824. a service of ...
Learning to drive from simulation without real world labels. Learning from Simulation, Racing in Reality | DeepAI In the following section we explain the necessary steps to perform the sim-to-real transfer for our autonomous racing task and discuss both simulation and experimental results. We also introduce a novel policy regularization approach to facilitate the sim-to-real transfer. Iii-a RL Setup Autonomous-Driving/SOTA For DRL&AD.md at master - GitHub Learning to Drive from Simulation without Real World Labels, Wayve, 2018, paper End-to-End Model-Free Reinforcement Learning for Urban Driving using Implicit Affordances, valeo, 2019, paper OUR TOP TIPS FOR CONDUCTING ROBOTICS FIELD RESEARCH, 2019, blog Urban Driving with Multi-Objective Deep Reinforcement Learning, AMMAS, paper Closing the Reality Gap with Unsupervised Sim-to-Real ... - SpringerLink Bewley, A., et al.: Learning to drive from simulation without real world labels. In: 2019 International Conference on Robotics and Automation (ICRA). IEEE (2019) Google Scholar Bousmalis, K., et al.: Using simulation and domain adaptation to improve efficiency of deep robotic grasping. Learning to Drive from Simulation without Real World Labels Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. Training and evaluating methods purely in simulation is often "doomed to succeed" at the desired task in a simulated environment, but the resulting models are incapable of operation in the real world.
Learning to drive from a world on rails | DeepAI To support learning from pre-recorded logs, we assume that the world is on rails, meaning neither the agent nor its actions influence the environment. This assumption greatly simplifies the learning problem, factorizing the dynamics into a nonreactive world model and a low-dimensional and compact forward model of the ego-vehicle. Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels By Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall Get PDF (3 MB) Abstract Simulation can be a powerful tool for understanding machine learning systems Deep Reinforcement and Imitation Learning for Self-driving Tasks 3.1 Simulation and Sensors. We use two scenarios generated with CARLA, SCN1 and SCN2, described below, and each one can be travelled in both directions. SCN1 consists of a two-lane road of 660 m approx., with well defined traffic lines and gentle combination of curves (Fig. 1, Left).. SCN2 consists of a residential street of 300 m approx., wide enough for two lanes, but without any traffic ... Learning to Drive from Simulation without Real World Labels - CORE We are not allowed to display external PDFs yet. You will be redirected to the full text document in the repository in a few seconds, if not click here.click here.
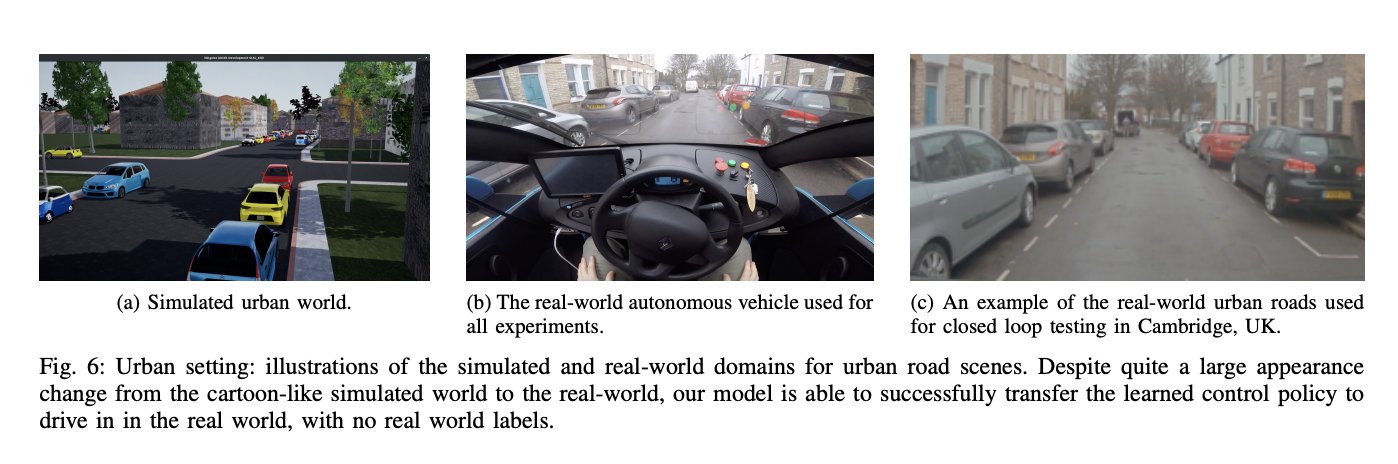
Research Roundup: Training with Synthetic Data - Datagen Learning to Drive from Simulation without Real World Labels (2018) Cambridge university researchers, working with a corporate team, teach a car to drive in a cartoon-like simulator. The novel idea was to teach the car to transcribe real-world data into its simulation-based understanding (real2sim) instead of attempting the reverse (sim2real). PDF Urban Driving with Conditional Imitation Learning - GitHub Pages The CARLA simulator [10] has enabled significant work on learning to drive. One example is the work of [11], which established a new behaviour cloning benchmark for driving in simulation. However, simulation cannot capture real-world complexities, and achieving high performance in Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam, Alex Kendall Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. Learning to Drive from Simulation without Real World Labels Abstract: Simulation can be a powerful tool for under-standing machine learning systems and designing methods to solve real-world problems. Training and evaluating methods purely in simulation is often "doomed to succeed" at the desired task in a simulated environment, but the resulting models are incapable of operation in the real world.
How Drive.ai Is Mastering Autonomous Driving With Deep ...
Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam, Alex Kendall The authors are with Wayve in Cambridge, UK. Abstract Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems.

Learning to Drive Smoothly in Minutes | by Antonin RAFFIN ...
Sim2Real: Learning to Drive from Simulation without Real World Labels See the full sim2real blog: drive on real UK roads using a model trained entirely in simulation.Research paper: ....

Deep Understanding Tesla FSD Part 4: Auto Labeling ...
Alex Bewley A method for transferring a vision-based lane following driving policy from simulation to operation on a rural road without any real-world labels. Our approach leverages recent advances in image-to-image translation to achieve domain transfer while jointly learning a single-camera control policy from simulation control labels. pdf video bib
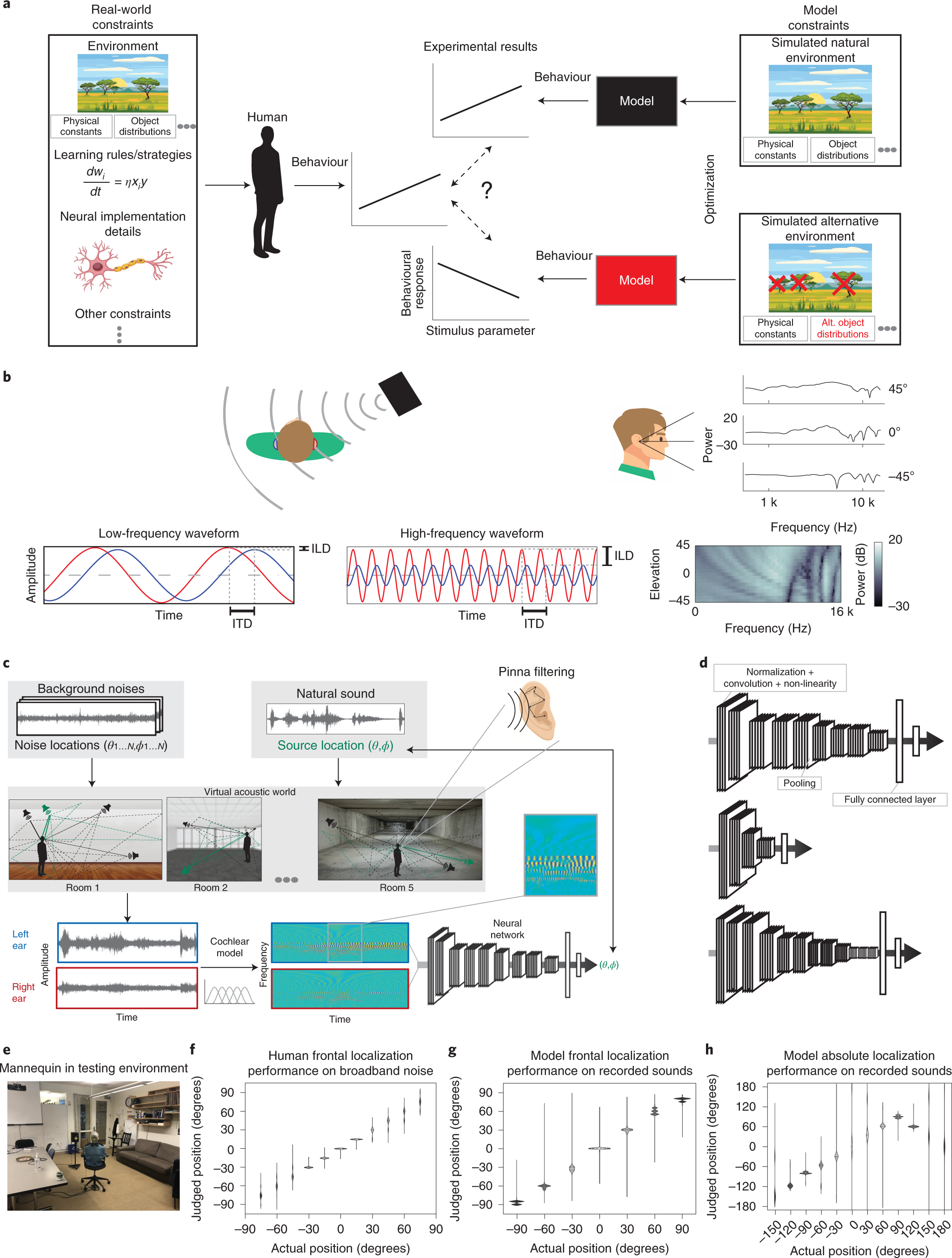
Deep neural network models of sound localization reveal how ...
Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels Authors: Alex Bewley Queensland University of Technology Jessica Rigley University of Cambridge Yuxuan Liu Jeffrey Hawke Wayve Abstract...
arXiv:2008.00715v2 [cs.RO] 6 Nov 2020
Edge Cases in Autonomous Vehicle Production - Datagen Figure 6. Comparison of simulated training and actual test environments in "Learning to Drive from Simulation without Real World Labels" (by Bewley et. al.) More recently, NVIDIA recently proposed a strategic approach named " imitation training " (Figure 7). In this approach, the failure cases of existing systems in the real world are ...
Inferring Concept Drift Without Labeled Data
Introduction to the CARLA simulator: training a neural network to ... Training neural network models on data gathered with two deterministic controllers and my non-deterministic self. Before we start, the source code for this whole project is available here. If you…
MIT system trains driverless cars using reinforcement ...
Publications - Home Jeffrey Hawke et al. Urban Driving with Conditional Imitation Learning. Proceedings of the International Conference on Robotics and Automation (ICRA), 2020. ... Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall. Learning to Drive from Simulation without Real World Labels. Proceedings of the International Conference on ...

Simulation Training, Real Driving | Wayve
Learning Interactive Driving Policies via Data-driven Simulation ... the high-level pipeline of the proposed multi-agent data-driven simulation consists of (1) updating states for all agents, (2) recreating the world by projecting real-world image data to 3d space based on depth information, (3) configuring and placing meshes for all agents in the scene, (4) rendering the agent's viewpoint, and (5) post-processing …

Simulation Training, Real Driving | Wayve
Self-driving Research in Review: ICRA 2019 Digest - Medium The presented method shows how to learn to drive in simulation while using Cycle GAN to relate the real world with a simulated one. The system is tested on a car that can perform a simple behavior...

Reinforcement learning for the real world – TechTalks
"Learning to Drive from Simulation without Real World Labels." - DBLP Bibliographic details on Learning to Drive from Simulation without Real World Labels. Stop the war! Остановите войну! ... "Learning to Drive from Simulation without Real World Labels." help us. How can I correct errors in dblp? ... Learning to Drive from Simulation without Real World Labels. ICRA 2019: 4818-4824. a service of ...
sim2real on Twitter: "Learning to Drive from Simulation ...
week 5 diss 1.docx - "Simulation outcomes indicate that... " Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems" (Bewley, A., et al., 2018). This being said, I'll want to make sure that the simulation content is going to be relatable to the students, as well as something that they'll be able to apply to their coursework.
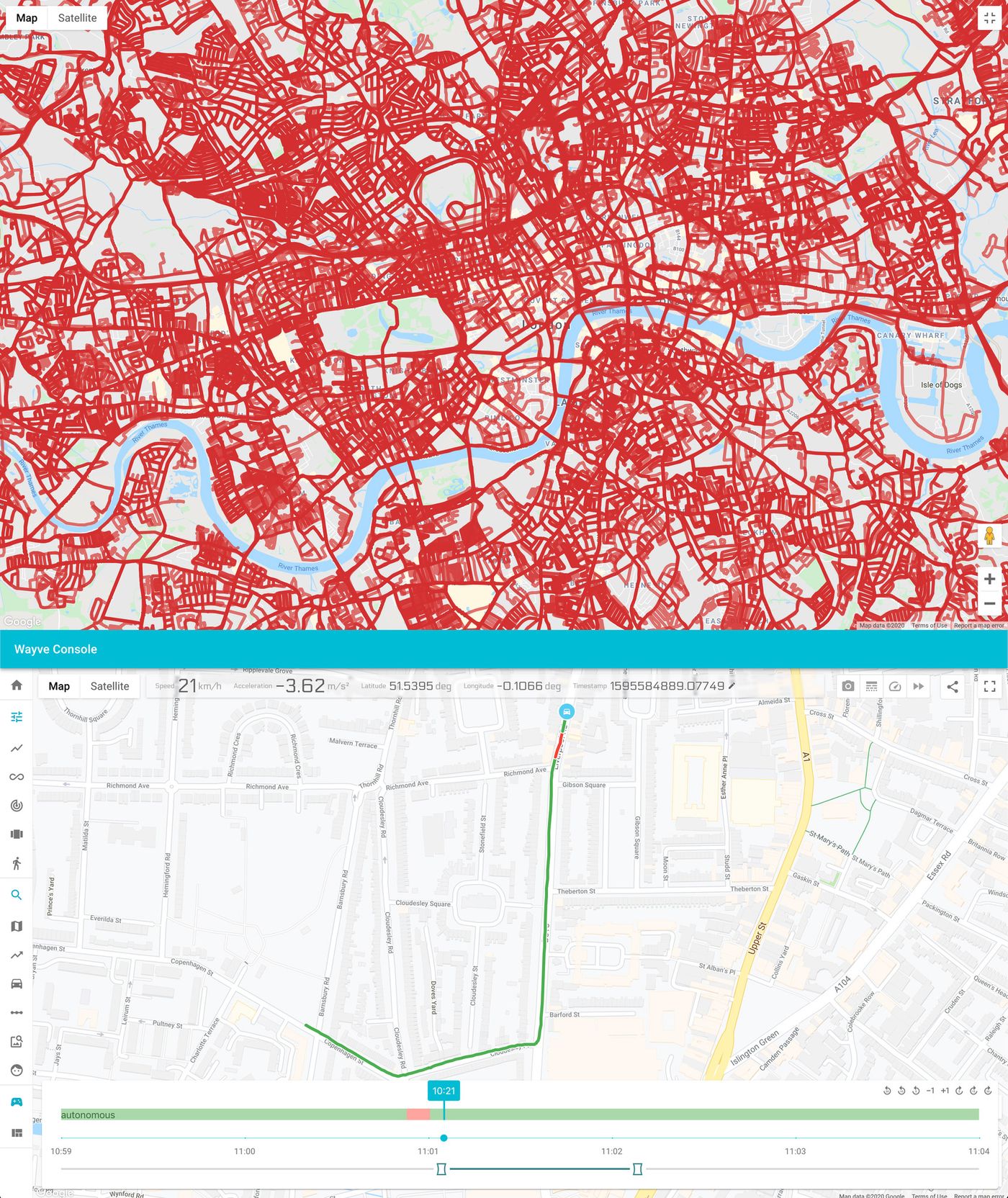
Technology | Wayve
sim2real on Twitter: "Learning Semantic Segmentation from Synthetic ... Closing the Sim-to-Real Loop: Adapting Simulation Randomization with Real World Experience https:// arxiv.org/abs/1810.05687
Blind Spot Detection for Safe Sim-to-Real Transfer
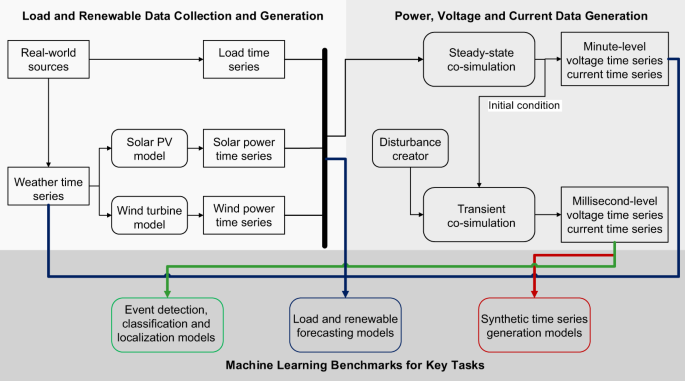
A multi-scale time-series dataset with benchmark for machine ...
![PDF] Learning to Drive from Simulation without Real World ...](https://d3i71xaburhd42.cloudfront.net/1254306ab0e1c8e179d9f31b4b9ea0cef7398bd8/4-Figure4-1.png)
PDF] Learning to Drive from Simulation without Real World ...

Field Notes: Building an Autonomous Driving and ADAS Data ...

Learning to Drive from Simulation without Real World Labels ...

Deep Learning Summit London 2019 - Day 1 - HackMD

Learning to Drive from Simulation without Real World Labels ...
![PDF] Learning to Drive from Simulation without Real World ...](https://d3i71xaburhd42.cloudfront.net/1254306ab0e1c8e179d9f31b4b9ea0cef7398bd8/3-Figure3-1.png)
PDF] Learning to Drive from Simulation without Real World ...
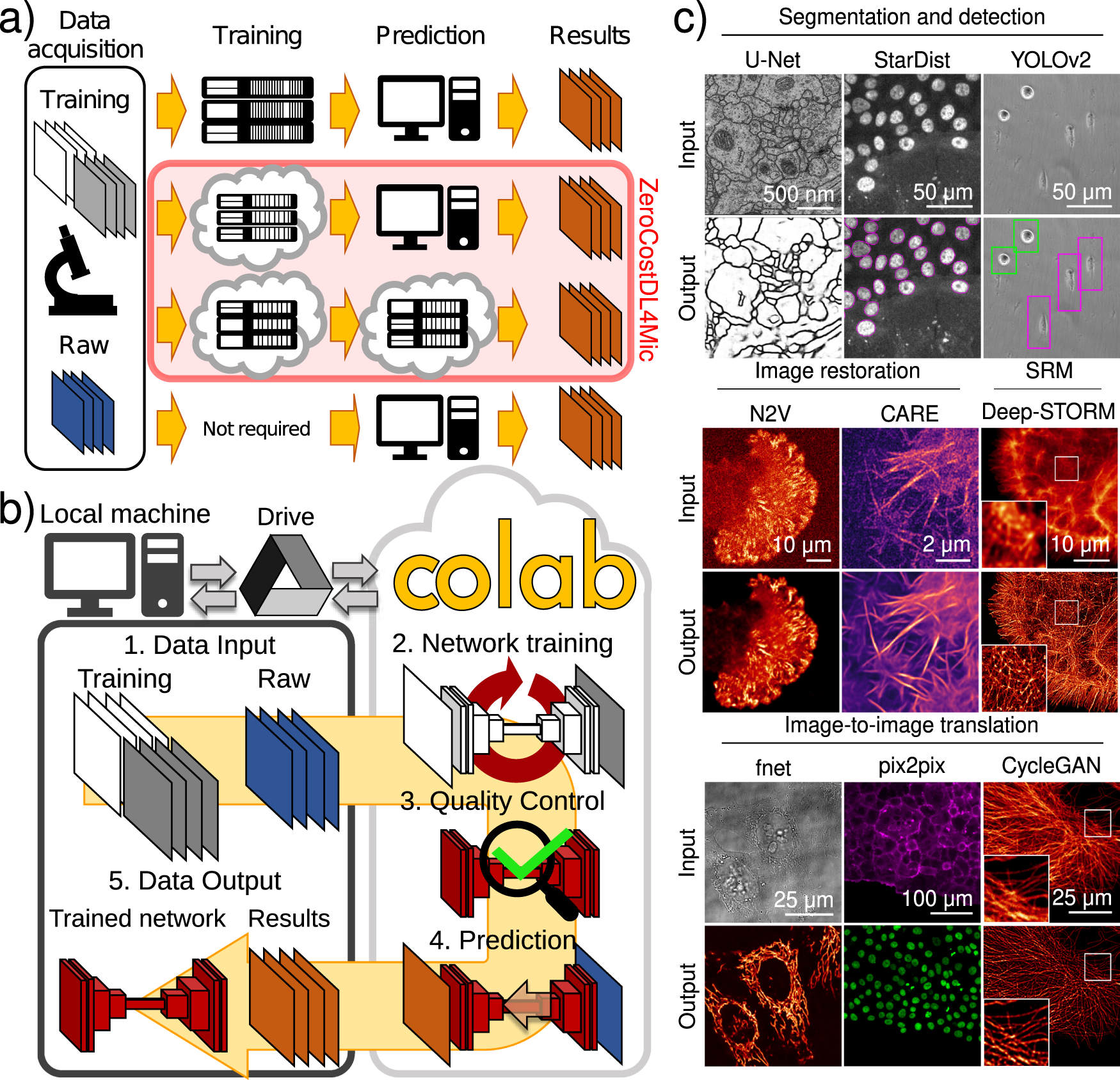
Democratising deep learning for microscopy with ...

Frontiers | AR DriveSim: An Immersive Driving Simulator for ...
This super-realistic virtual world is a driving school for ...

Real Driving Sim
Deep Understanding Tesla FSD Part 4: Auto Labeling ...

PDF) Learning to Drive from Simulation without Real World Labels

Training autonomous vehicles requires more than simulation ...

Learning to Drive Smoothly in Minutes | by Antonin RAFFIN ...

Google AI Blog: Toward Generalized Sim-to-Real Transfer for ...

We Automate Annotations at understand.ai
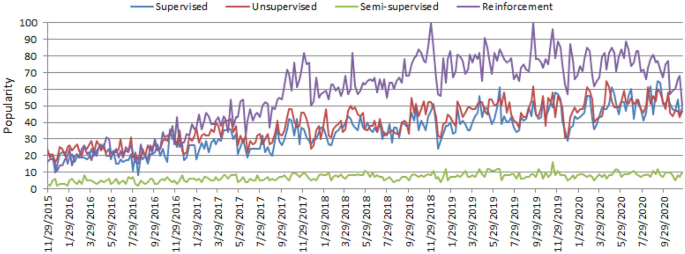
Machine Learning: Algorithms, Real-World Applications and ...

DeliverySim™ Heavy Truck Driving Simulator | L3Harris™

PDF) Learning to Drive from Simulation without Real World Labels
Inside Waymo's Secret World for Training Self-Driving Cars ...

MADRaS: A Multi-Agent DRiving Simulator

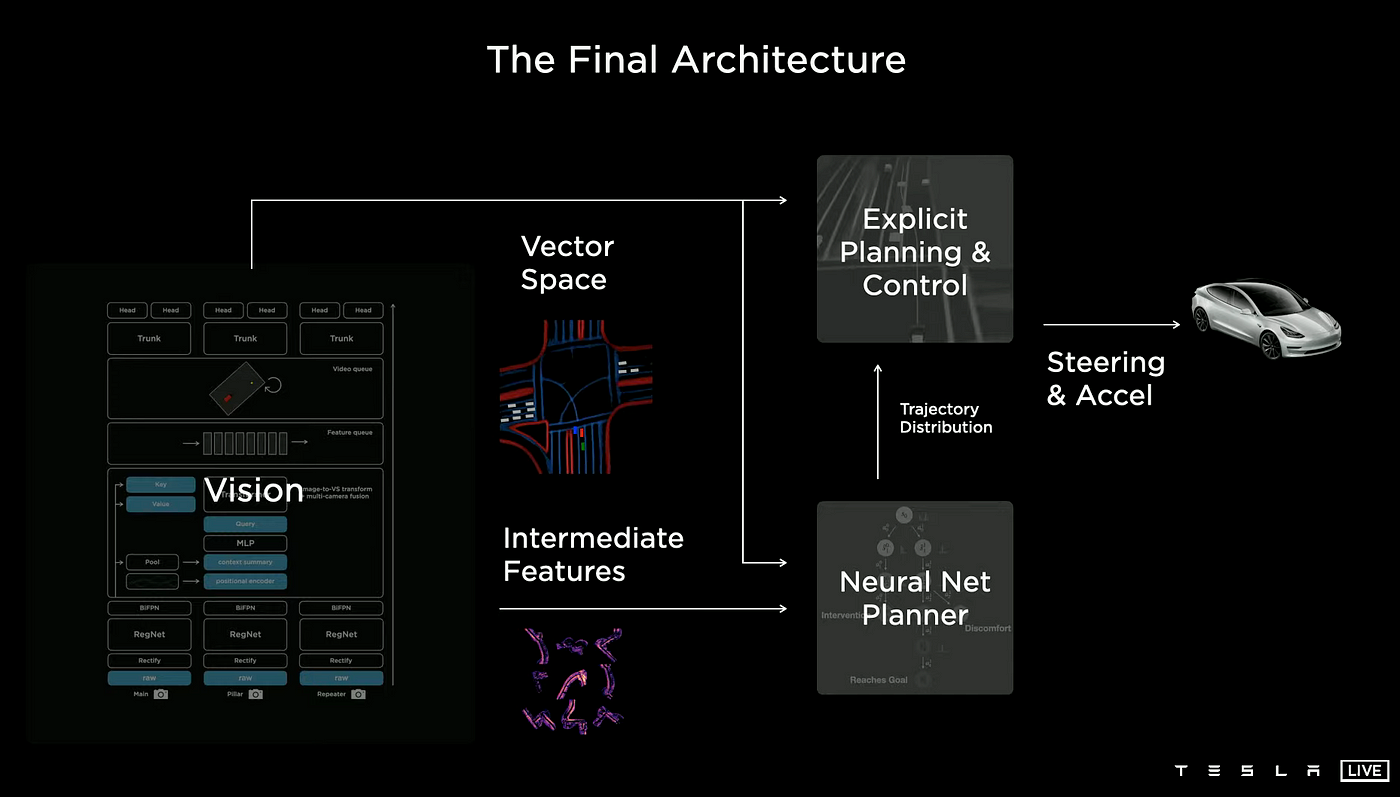
Top four highlights of Elon Musk's Tesla AI Day | TechCrunch

Agents, environments, scenarios: A framework for examining ...
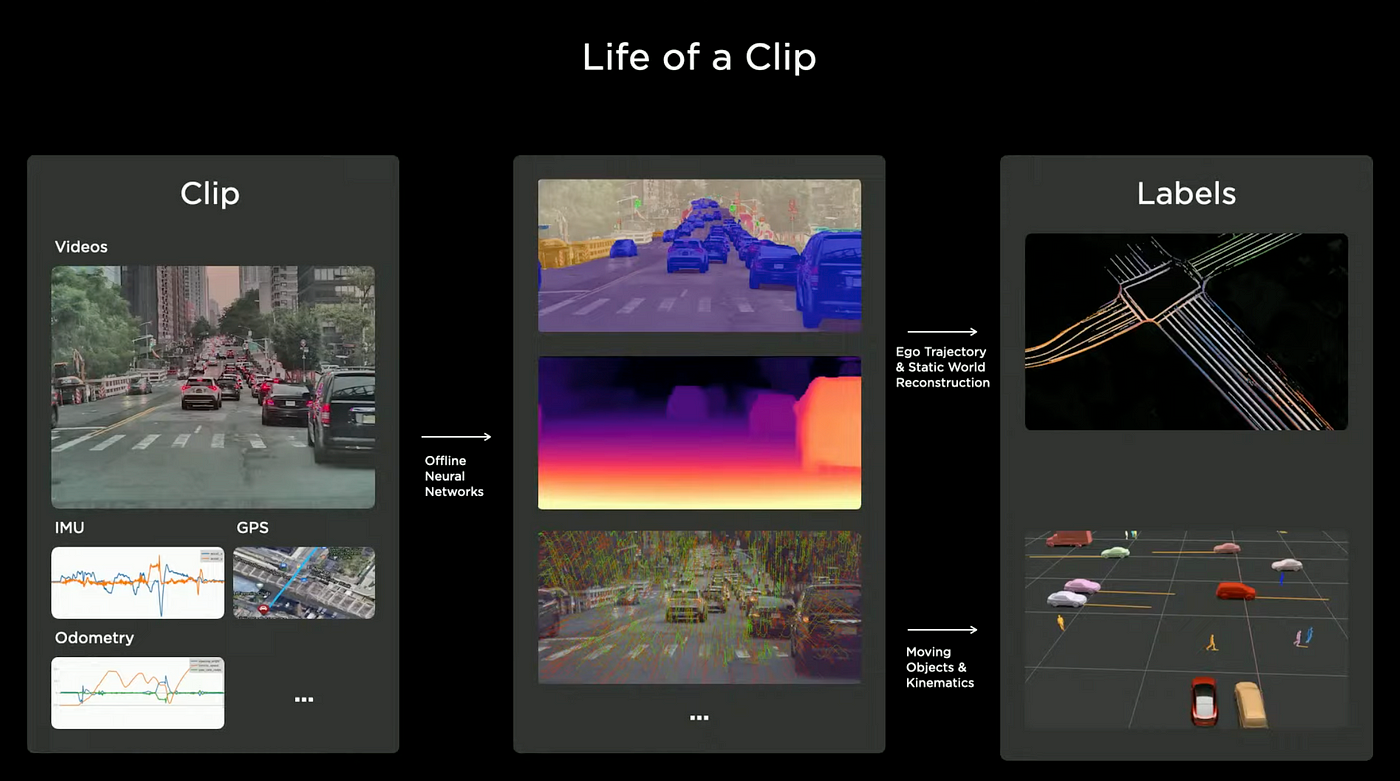
Deep Understanding Tesla FSD Part 4: Auto Labeling ...
Post a Comment for "38 learning to drive from simulation without real world labels"